













| AUTONOMOUS DRIVING TESTBED C-TRACK | |
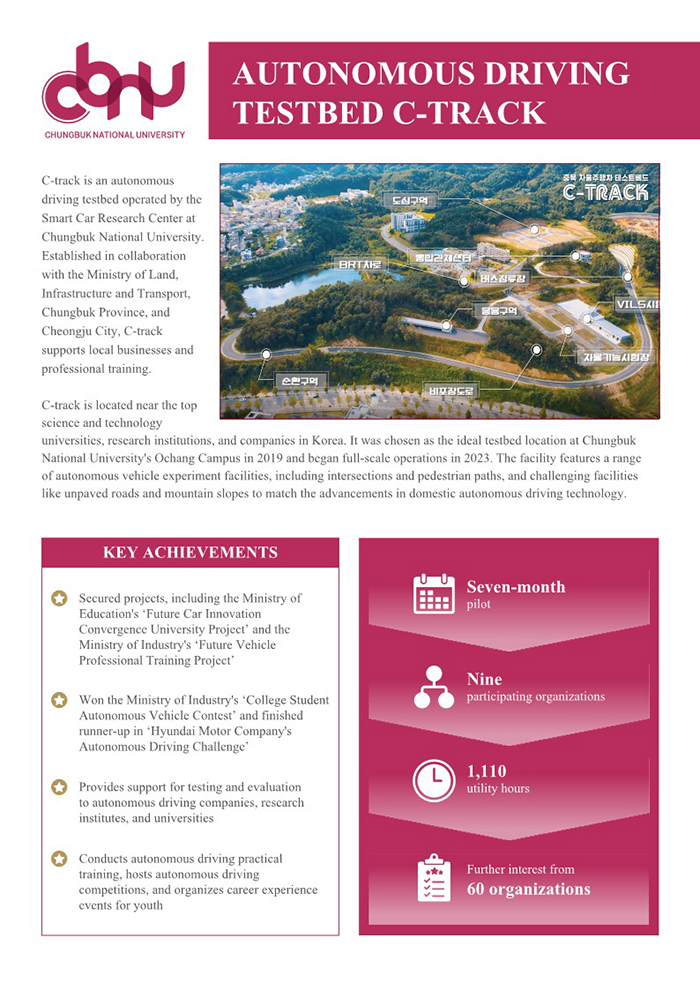  
 C-track&전파플레이그라운드 AUTONOMOUS DRIVING TESTBED C-TRACK C-track is an autonomous driving testbed operated by the Smart Car Research Center at Chungbuk National University. Established in collaboration with the Ministry of Land, Infrastructure and Transport, Chungbuk Province, and Cheongju City, C-track supports local businesses and professional training.
C-track is located near the top science and technology universities, research institutions, and companies in Korea. It was chosen as the ideal testbed location at Chungbuk National University's Ochang Campus in 2019 and began full-scale operations in 2023. The facility features a range of autonomous vehicle experiment facilities, including intersections and pedestrian paths, and challenging facilities like unpaved roads and mountain slopes to match the advancements in domestic autonomous driving technology.
KEY ACHIEVEMENTS -Secured projects, including the Ministry of Education's ‘Future Car Innovation Convergence University Project’ and the Ministry of Industry's ‘Future Vehicle Professional Training Project’ -Won the Ministry of Industry's ‘College Student Autonomous Vehicle Contest’ and finished runner-up in ‘Hyundai Motor Company's Autonomous Driving Challenge’ -Provides support for testing and evaluation to autonomous driving companies, research institutes, and universities -Conducts autonomous driving practical training, hosts autonomous driving competitions, and organizes career experience events for youth
-Seven-month pilot -Nine participating organizations -1,110 utility hours -Further interest from 60 organizations
RESEARCH PUBLICATIONS
• Hakjoo Kim and Seok-Cheol Kee, “Neural Network Approach Super-Twisting Sliding Mode Control for Path-Tracking of Autonomous Vehicles,” Electronics, vol. 12, no. 17, pp. 3635, August 2023 (IF: 2.9) DOI: 10.3390/electronics12173635 • Youn-Ho Choi and Seok-Cheol Kee, “Monocular Depth Estimation Using a Laplacian Image Pyramid with Local Planar Guidance Layers,” Sensors, vol. 23, no. 2, pp. 845, January 2023 (IF: 3.9) DOI: 10.3390/s23020845 • Dongkyu Lee and Seok-Cheol Kee, “Efficient Camera–LiDAR Calibration Using Accumulated LiDAR Frames,” IEEE Access, vol. 10, pp. 132349–132362, December 2022 (IF: 3.9) DOI: 10.1109/ACCESS.2022.3230463 • Sunwoo Lee, Dongkyu Lee and Seok-Cheol Kee, “Deep-Learning-Based Parking Area and Collision Risk Area Detection Using AVM in Autonomous Parking Situation,” Sensors, vol. 22, no. 5, pp. 1986, March 2022 (IF: 3.9) DOI: 10.3390/s22051986 • Tae-Hyeong Kim, Gi-Hwan Jo, Hyeong-Seok Yun, Kyung-Su Yun, Tae-Hyoung Park, “Placement Method of Multiple Lidars for Roadside Infrastructure in Urban Environments,” Sensors, vol. 23, pp. 8808–8816, October 2023 (IF: 3.9) DOI: 10.3390/s23218808 • Taek-Lim Kim, Saba Arshad, Tae-Hyoung Park, “Adaptive Feature Attention Module for Robust Visual-LiDAR Fusion-Based Object Detection in Adverse Weather Conditions,” Remote Sensing, vol. 15, pp. 3992–4010, August 2023 (IF: 5.0) DOI: 10.3390/rs15163992 • Jae-Seol Lee, Tae-Hyung Park, “Transformable Dilated Convolution by Distance for LiDAR Semantic Segmentation,” IEEE Access, vol. 10, pp. 125102–125111, November 2022 (IF: 3.9) DOI: 10.1109/ACCESS.2022.3225556 • Taek-Lim Kim, Tae-Hyoung Park, “Camera-LiDAR Fusion Method with Feature Switch Layer for Object Detection Networks,” Sensors, vol. 22, no. 19, pp. 7163, September 2022 (IF: 3.9) DOI: 10.3390/s22197163 • Loc Hoang Duy, and Gon-Woo Kim, “AEC3D: An Efficient and Compact Single Stage 3D Multiobject Detector for Autonomous Driving,” IEEE Transactions on Intelligent Transportation Systems, vol. 23, no. 12, pp. 23422–23432, August 2022 (IF: 8.5) DOI: 10.1109/TITS.2022.3195633
Find out more about the Chungbuk National University Smart Car Research Center here
Total investments KRW 29.5 billion Total area 83,096 m² FEATURES -Urban, outdoor, application, and parking areas, with a 1.4 km circuit road -Integrated Monitoring and Control Center -VILS (Vehicle-In-the-Loop Simulation) test center -Transportation infrastructure (HD maps, traffic lights, roundabouts, bus stops, electric vehicle chargers, U-turn zones, etc.) -16 types of test roads
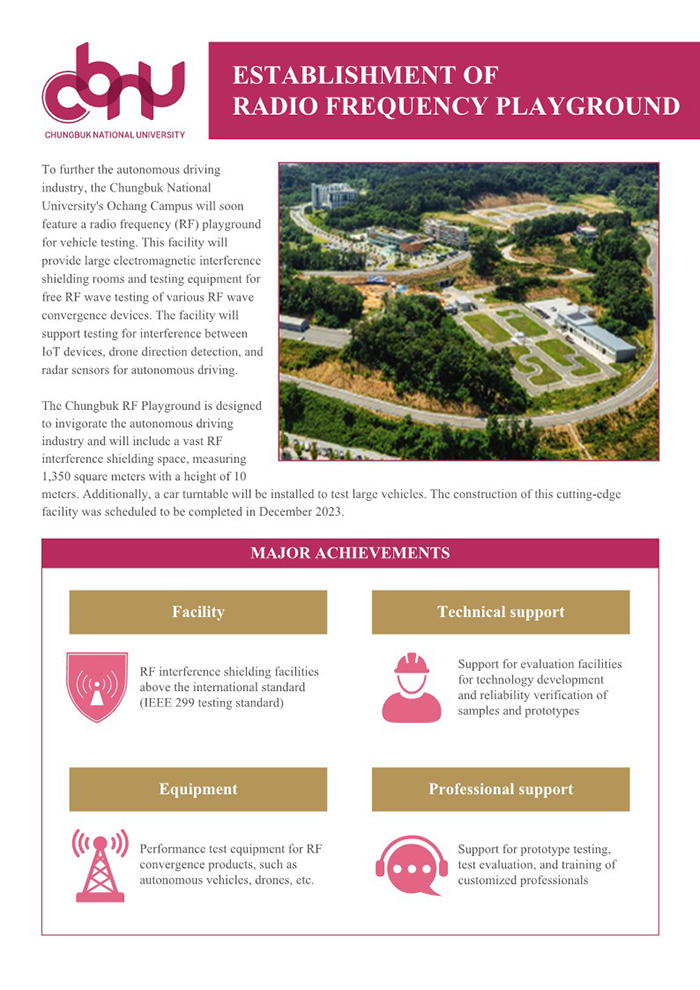
ESTABLISHMENT OF RADIO FREQUENCY PLAYGROUND To further the autonomous driving industry, the Chungbuk National University's Ochang Campus will soon feature a radio frequency (RF) playground for vehicle testing. This facility will provide large electromagnetic interference shielding rooms and testing equipment for free RF wave testing of various RF wave convergence devices. The facility will support testing for interference between IoT devices, drone direction detection, and radar sensors for autonomous driving. The Chungbuk RF Playground is designed to invigorate the autonomous driving industry and will include a vast RF interference shielding space, measuring 1,350 square meters with a height of 10 meters. Additionally, a car turntable will be installed to test large vehicles. The construction of this cutting-edge facility was scheduled to be completed in December 2023.
MAJOR ACHIEVEMENTS
Facility RF interference shielding facilities above the international standard (IEEE 299 testing standard) Technical support Support for evaluation facilities for technology development and reliability verification of samples and prototypes Equipment Performance test equipment for RF convergence products, such as autonomous vehicles, drones, etc. Professional support Support for prototype testing, test evaluation, and training of customized professionals
EXPECTED OUTCOMES The RF playground is expected to facilitate the development of professional personnel with extensive research and development experience who can provide assistance and support with free RF wave tests, testing, measurement, and technical advice to meet the various RF wave demands of local businesses. The playground will also facilitate the growth of the industrial ecosystem by working closely with local infrastructure, including the Chungju Transportation Mechanical Parts RF Center and C-track, a specialized facility in the autonomous vehicle industry. The test evaluation and human resources training program will likely achieve completion by March 2024.
RADAR TARGET SIMULATOR • Verification of the driving scenario of the autonomous vehicle radar and urban air mobility (UAM) simulator to create a virtual radar target • Frequency: 76 GHz–81 GHz • Number of targets: 2 GLOBAL NAVIGATION SATELLITE SYSTEMS (GNSS) SIMULATOR • Perform various reception performance tests on GPS receivers • Support for GNSS systems by major countries • Simulate a moving situation
SIGNAL GENERATOR • Generating up to 44 GHz standard signals based on long-term evolution and 5G new radio frequency range 2 • Apply to the development of autonomous vehicle radar and pulse signal development for UAM • Frequency: 100 kHz –31.8 GHz
SPECTRUM ANALYSIS MACHINE • Measuring components by frequency for signals (universal) • Measure pulse signals used in the autonomous vehicle radar and UAM • Frequency: 2 Hz–85 GHz • Analysis bandwidth: 4.4 GHz
|